Fallback behavior (without Hybrid EMS)
Last modified:
To exercise adequate control, the blue'Log relies on several factors, such as external setpoints or measured values. In case of an error – for example, communication with the grid operator is interrupted – these values are no longer available, and the blue'Log will go into predefined, or fail-safe operation.
When does the blue'Log go into fail-safe operation?
The blue'Log will enter fail-safe operation when one of the following errors is detected:
Error on the interface for setpoint transmission or method switch command
Error on the interface for required measured values/error on the interface to the power analyzer/meter (only if the meter is configured and part of power control, for example, closed loop, characteristic curve)
Error on the interface for correction value transmission/error on the interface to inverters (only if Inverter failure detection is activated under Extended controller parameterizations)
Active power is above the configured threshold: only if the Automatic grid disconnection license is active and the grid disconnection time has elapsed. Note: This is different from the fallback wait time!
The blue'Log will only go into fail-safe operation if a predefined wait time (default 60s) has elapsed since the fault occurred. During the wait time, the blue'Log tries to use the previous valid measurements and the valid setpoint, if available. If no setpoint was initially transmitted, the blue'Log waits until the wait time has elapsed, and uses the system fallback value (see What is the system fallback value). In this case, no correction values are calculated and transmitted until the wait time has elapsed or a valid setpoint is received.
The error behavior can be defined separately for active and reactive power control.
Error behavior: active power control
What is the error behavior?
The behavior in the event of an error can be defined as follows:
Maintain last setpoint: the last valid setpoint is maintained
Default setpoint: a fixed fallback value can be defined
Automatic grid disconnection: the system will be disconnected from the grid and the setpoint is changed to 0 %. This is only possible with the automatic grid disconnection license
In case of a meter fallback (error on the interface to the power analyzer), there is no change to a fallback setpoint, but the control always changes from closed-loop to open-loop.
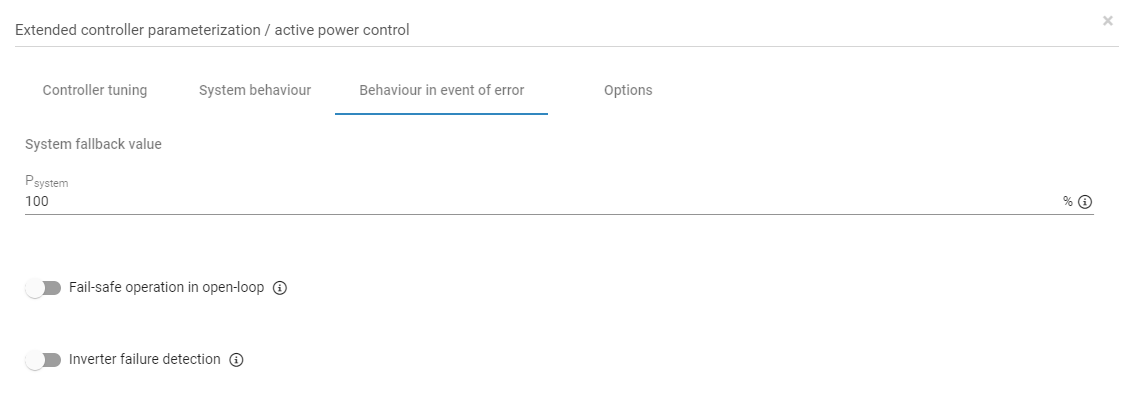
You can also configure the fallback setpoint (last setpoint/default setpoint) such that it is always processed in open-loop. This can be activated separately under Extended controller parameterization > Behavior in event of error.
What is the system fallback value?
You can define a system fallback value under Extended controller parameterization > Behavior in event of error. This system fallback value only applies if the controller enters an undefined state. This can only happen if Hold last setpoint is selected as the fallback value and no setpoint and/or method has been transmitted before the wait time elapses. This will only happen after either the blue’Log has rebooted or power control has been started via the web interface.
This can happen if:
An external setpoint source has been selected as a method – for example P(Modbus), P(DI), P(AI) – and no valid setpoint has been received.
The method switch is enabled but no valid signal has been sent to the data logger, and no default method is configured. Note: Default methods are only possible with a method switch via digital input.
User interface
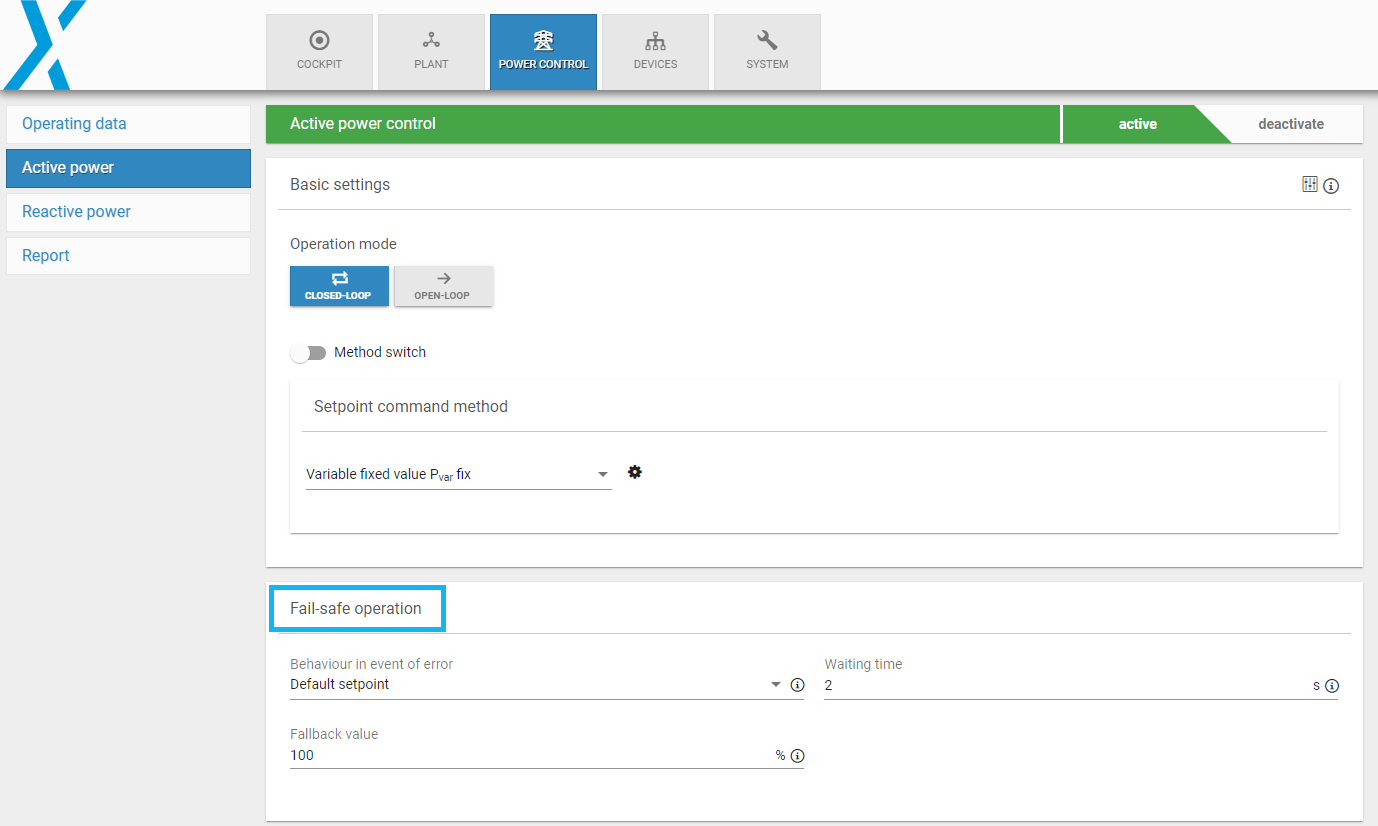
Fail-safe operation
Behaviour in the event of an error
Error behavior of blue'Log XM slave
In a master-slave setup, the blue'Log XC master sends the configured fallback settings (behaviour in event of error, wait time) cyclically to the blue'Log XM slave. If a communication failure between the master and slave occurs, the slave adopts the fallback settings and acts accordingly.
Please note that the blue’Log XM Slave is not a controller and thus simply forwards the resulting fallback values to the inverters without a feedback loop.
Example 1
Behaviour in event of error: Hold last setpoint
Wait time: 60 seconds
After a communication loss, the blue'Log XM slave waits for 60 seconds, then continues to send the last value it received to the inverters.
Example 2
Behaviour in event of error: Default setpoint = 50%
Wait time: 60 seconds
After a communication loss, the blue'Log XM slave waits for 60 seconds, then switches to the configured default value of 50% and sends this to the inverters.